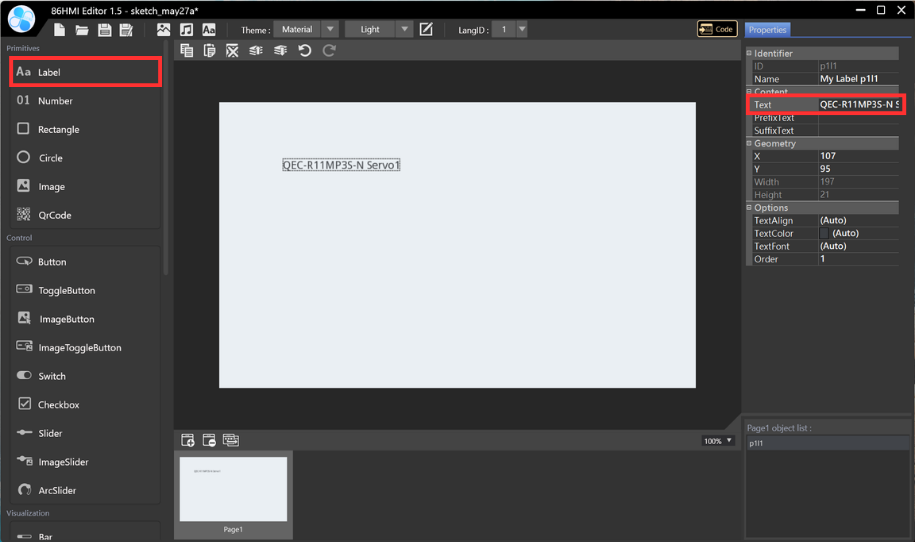
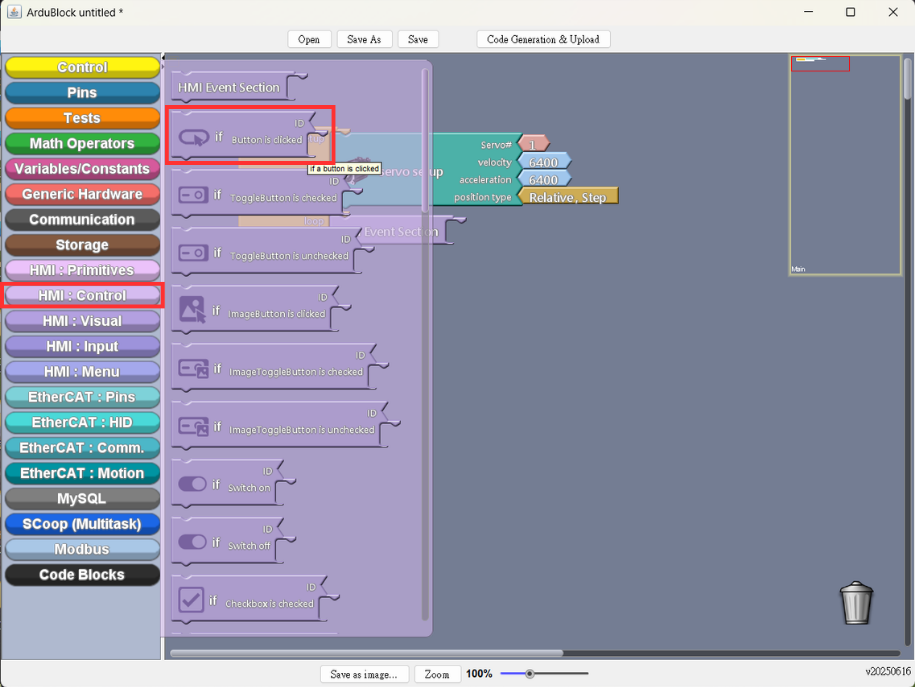
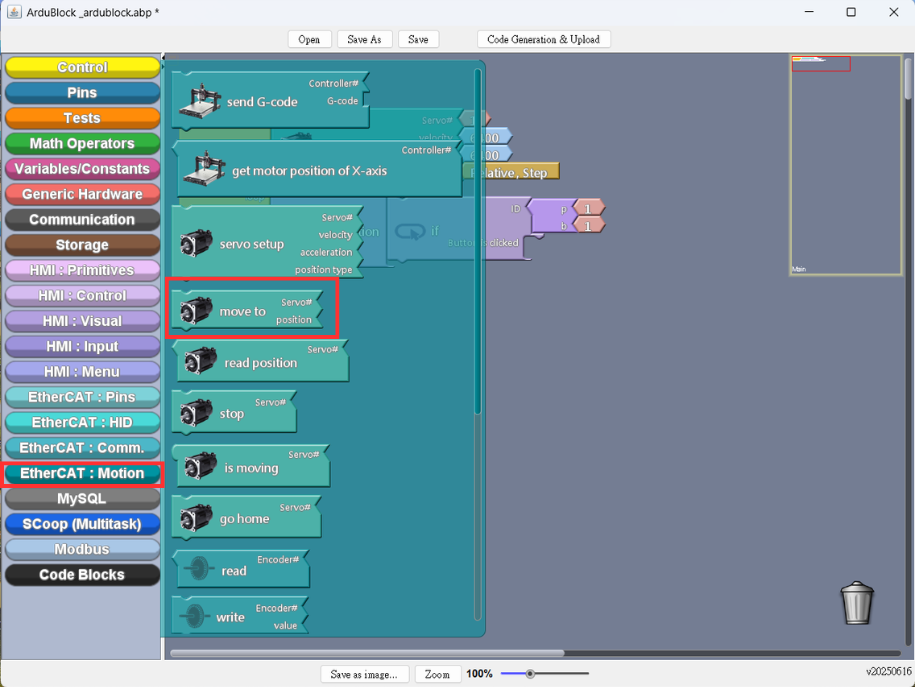
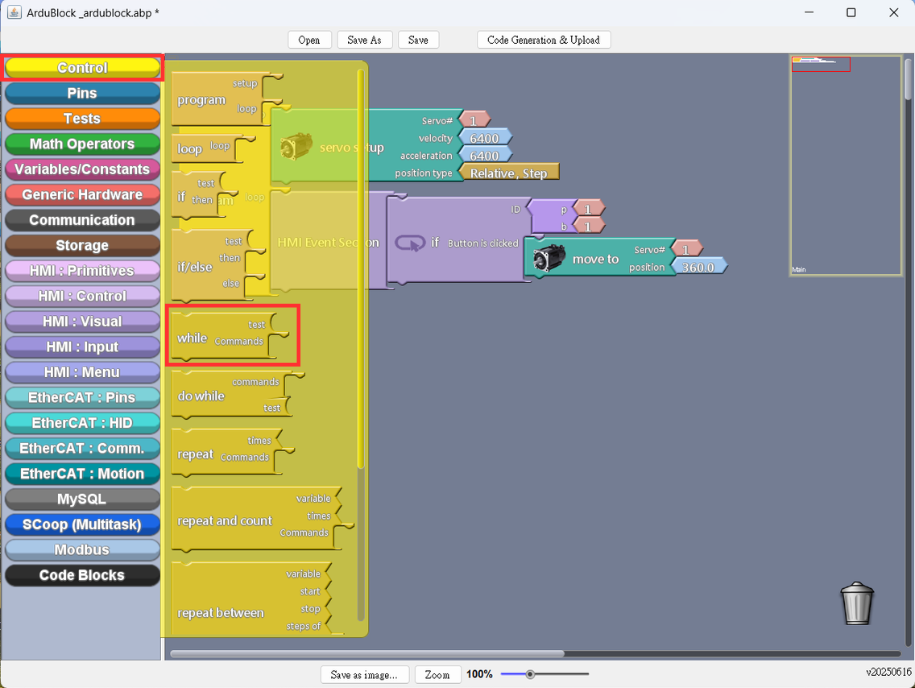
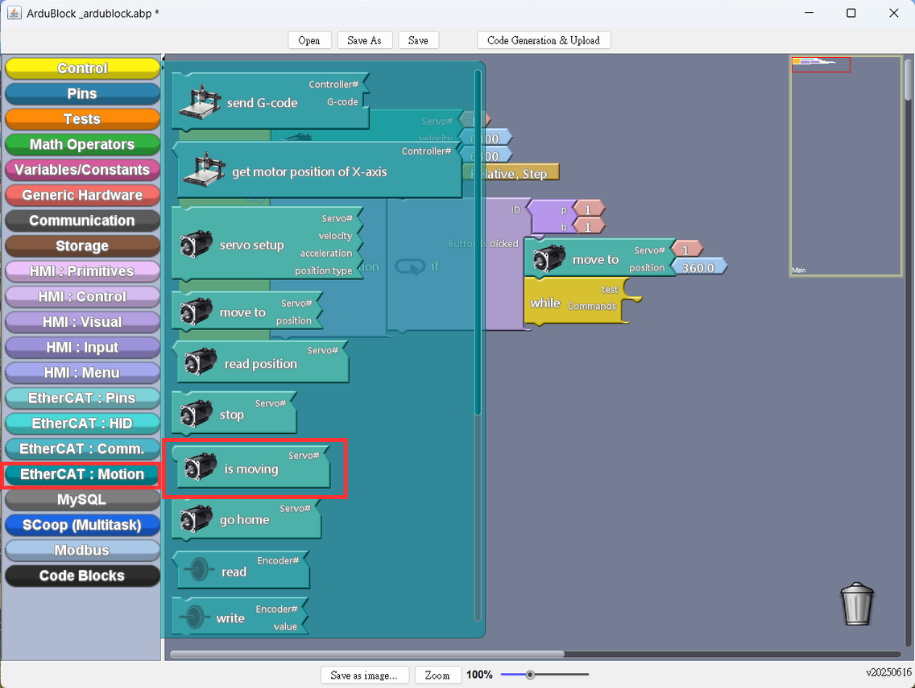
This example demonstrates how to quickly implement stepper motor control using the 86Duino platform — covering HMI button design with 86HMI Editor and drag-and-drop programming with ArduBlock.

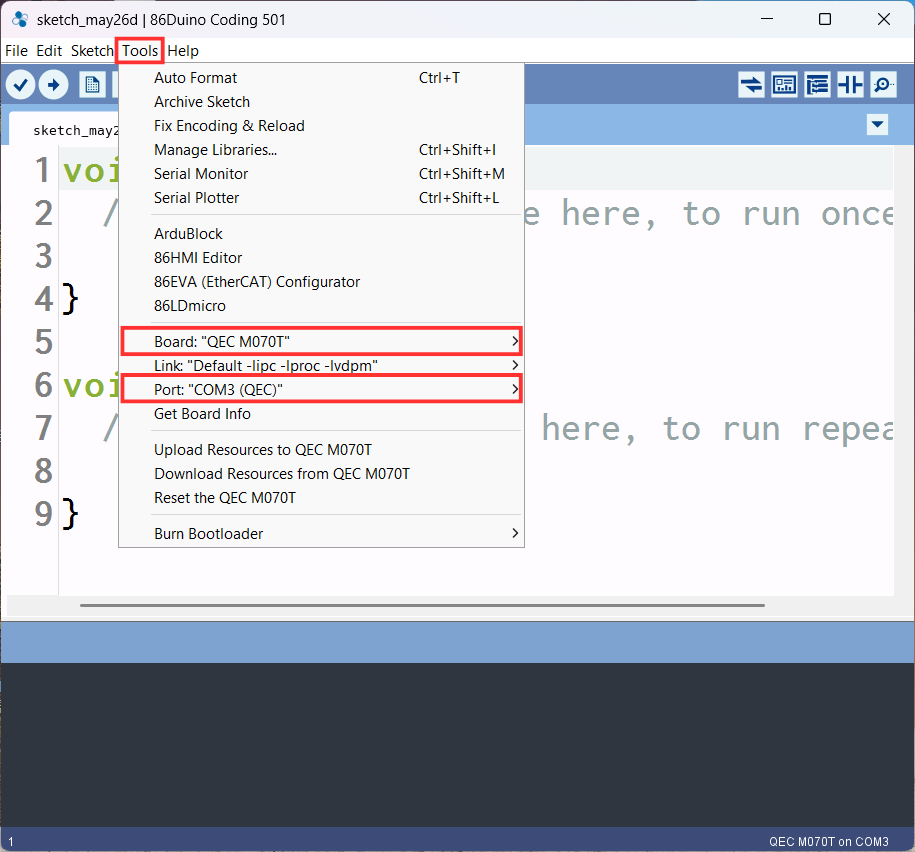
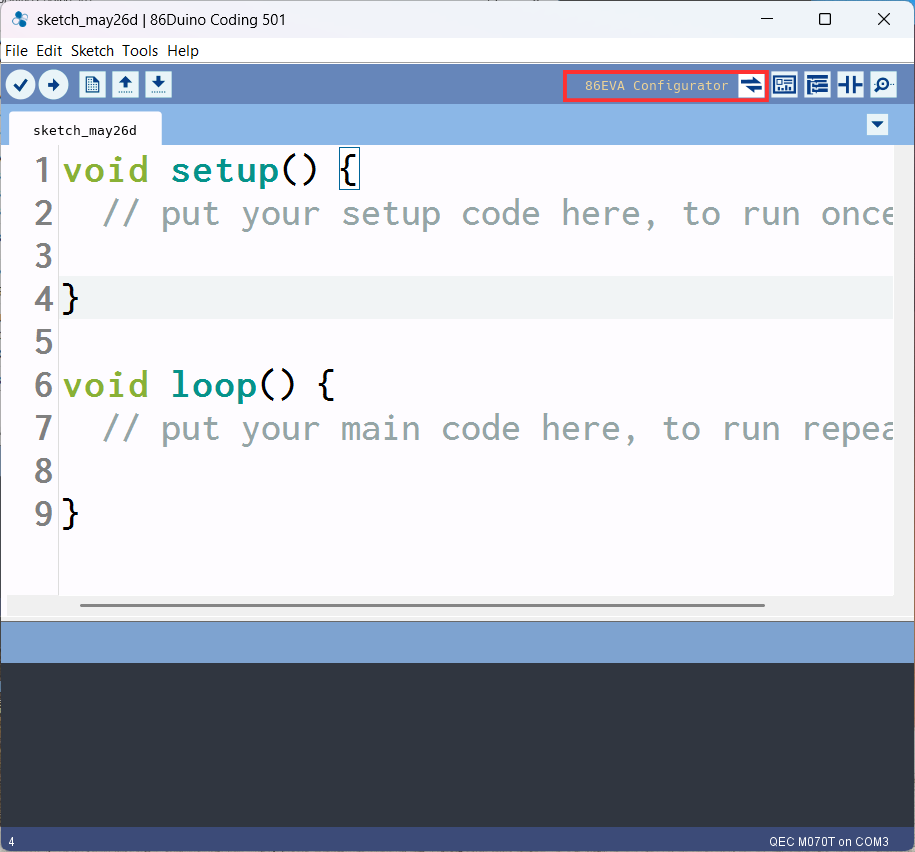
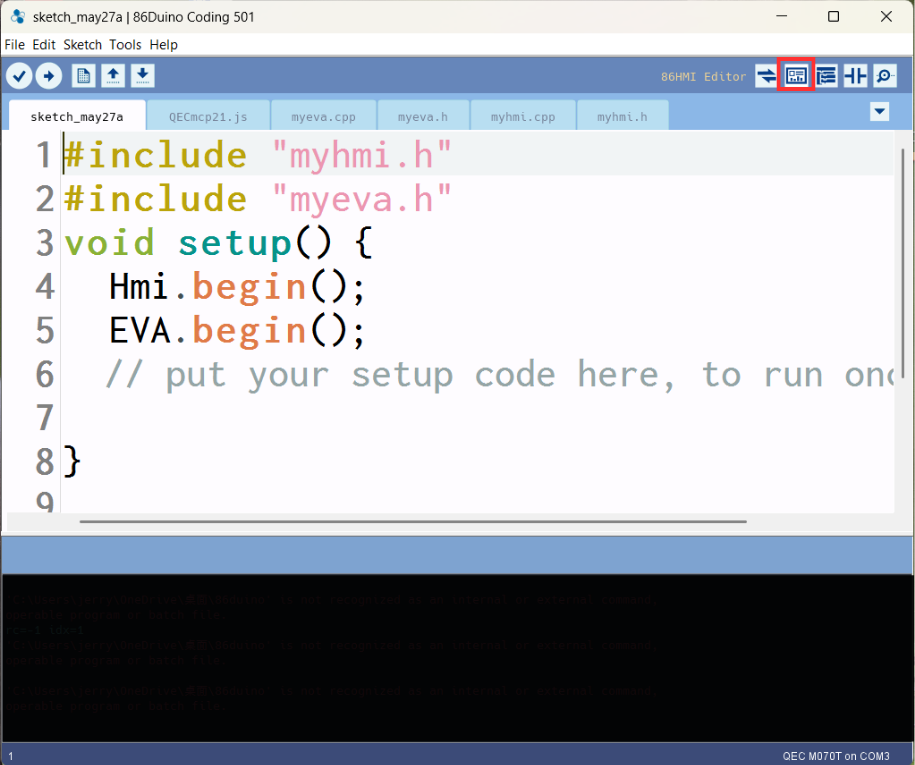
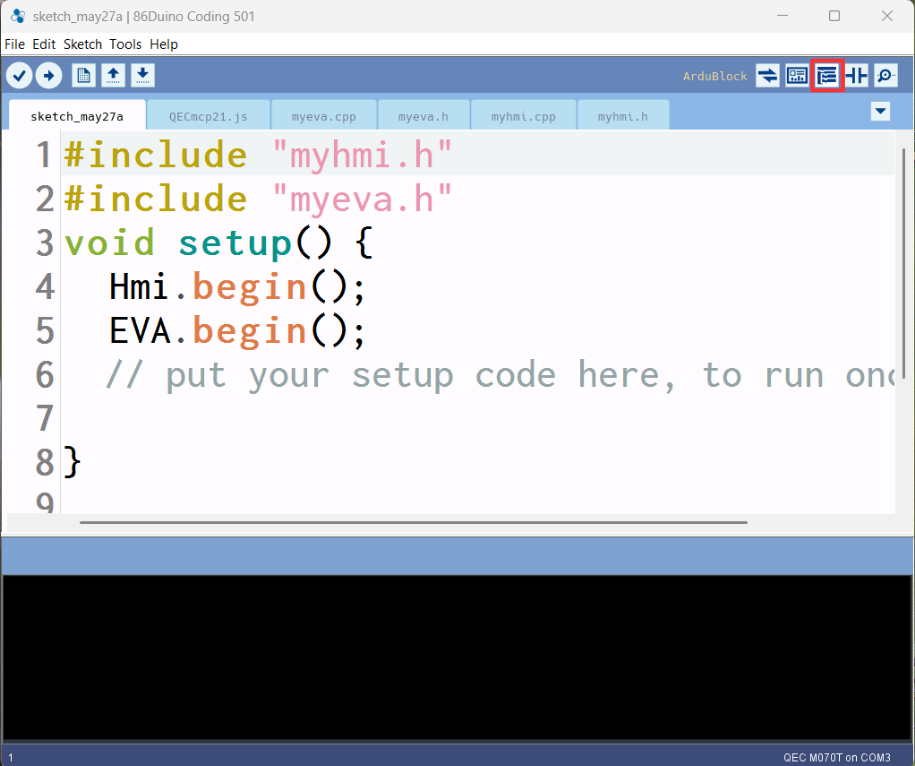
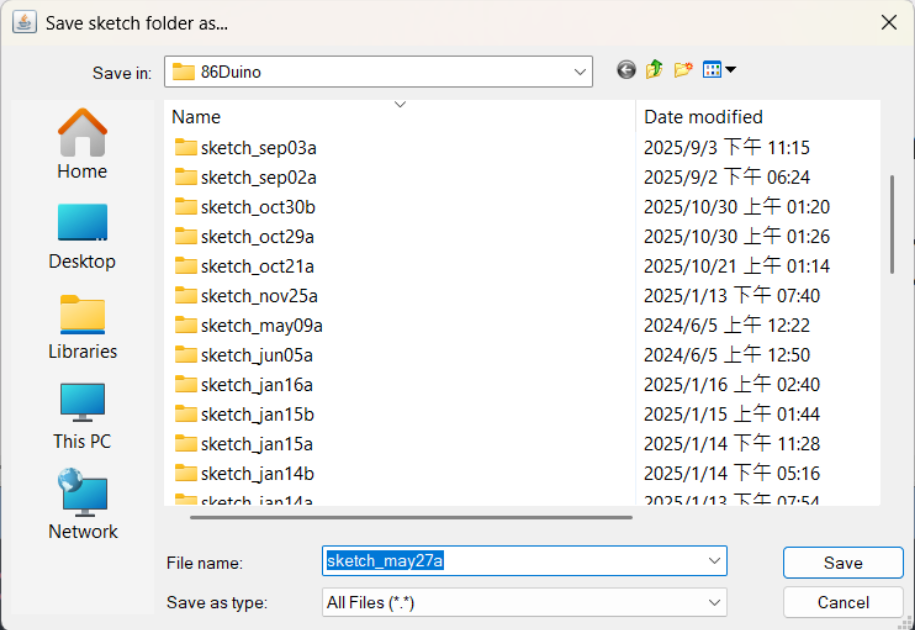
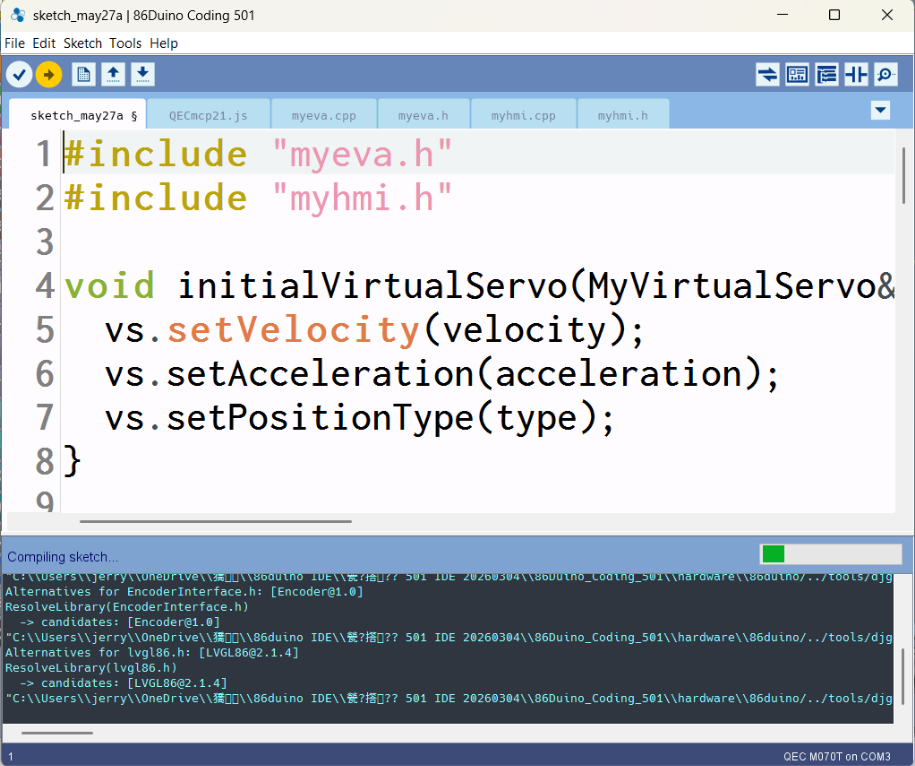
To compile and upload the control program to the QEC controller, the 86Duino IDE is required. The 86Duino IDE provides an Arduino-compatible development environment used to upload programs generated from ArduBlock or written using standard C/C++.
Readers can download the latest version of the 86Duino IDE from the QEC website: 86Duino Coding IDE
For users who are new to the platform, a step-by-step guide is also available to help you set up the development environment and get started with your first project: Getting started with the 86Duino
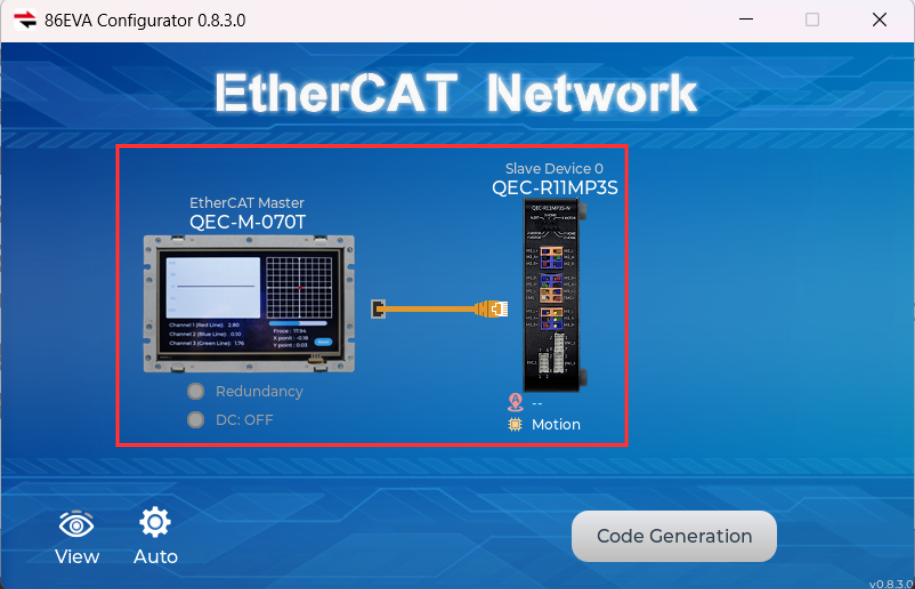
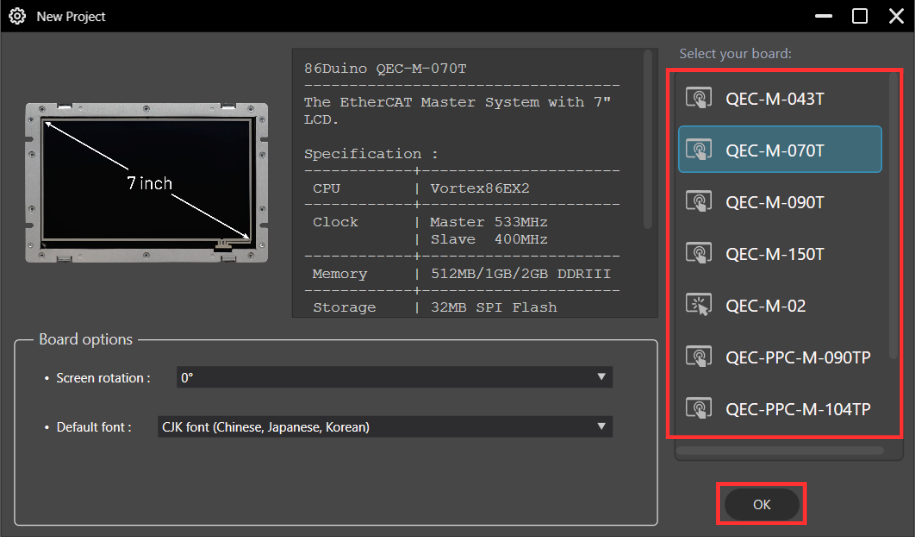
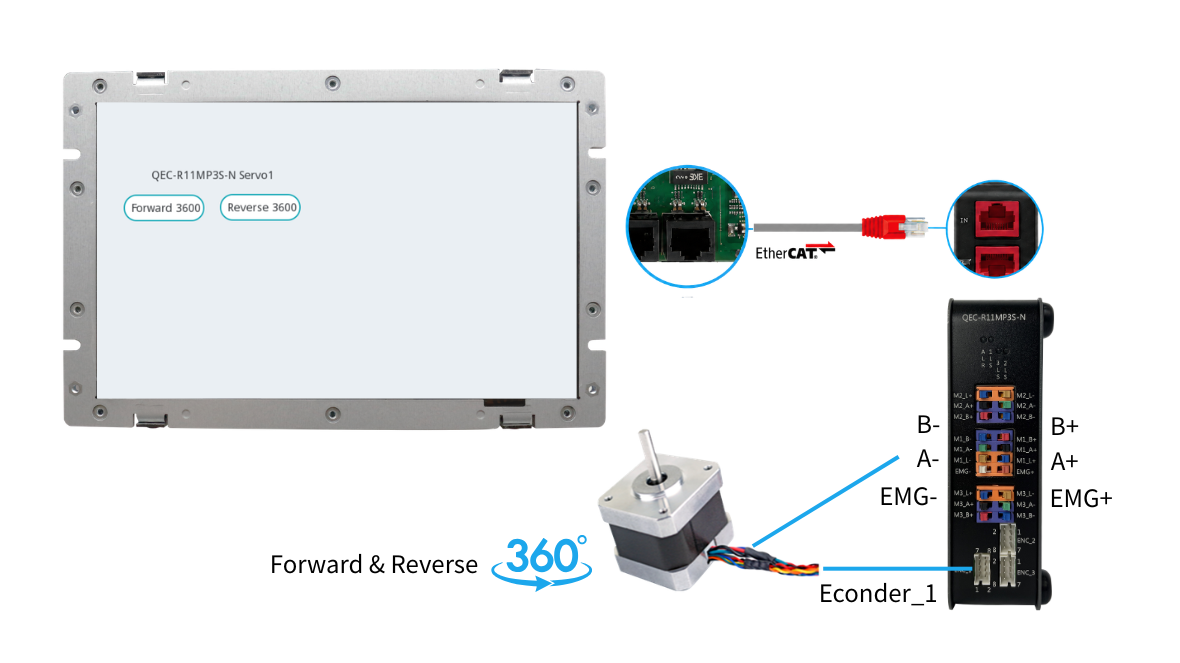
The hardware setup uses the QEC-M-070T as the EtherCAT MDevice controller and the QEC-R11MP3S-N as the SubDevice stepper motor driver:
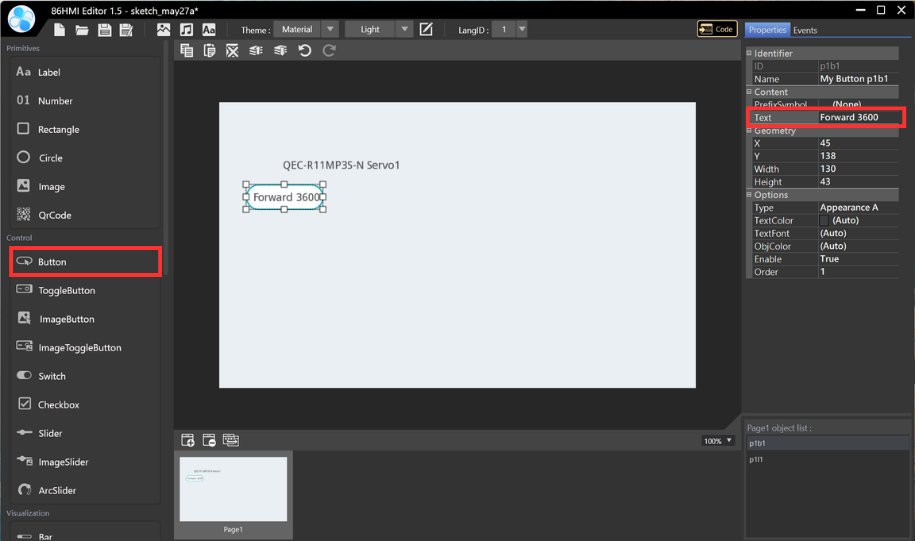
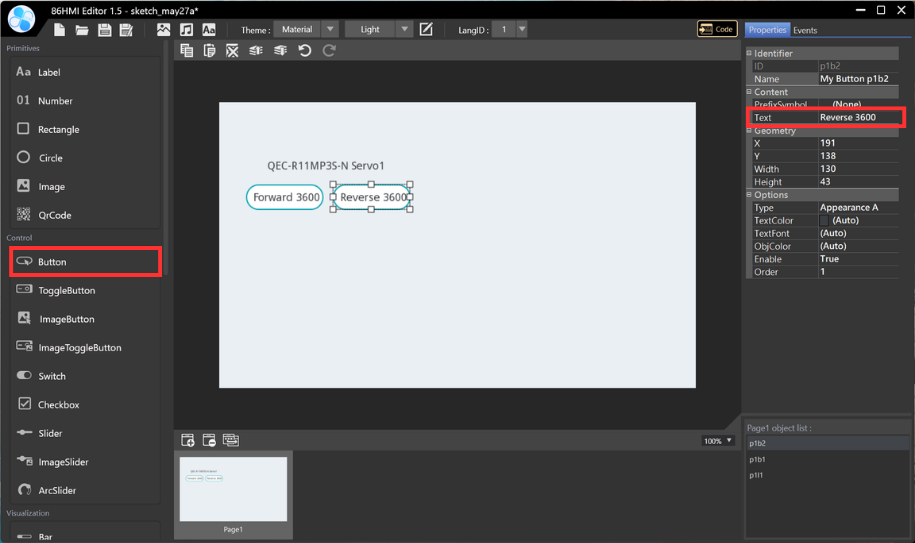
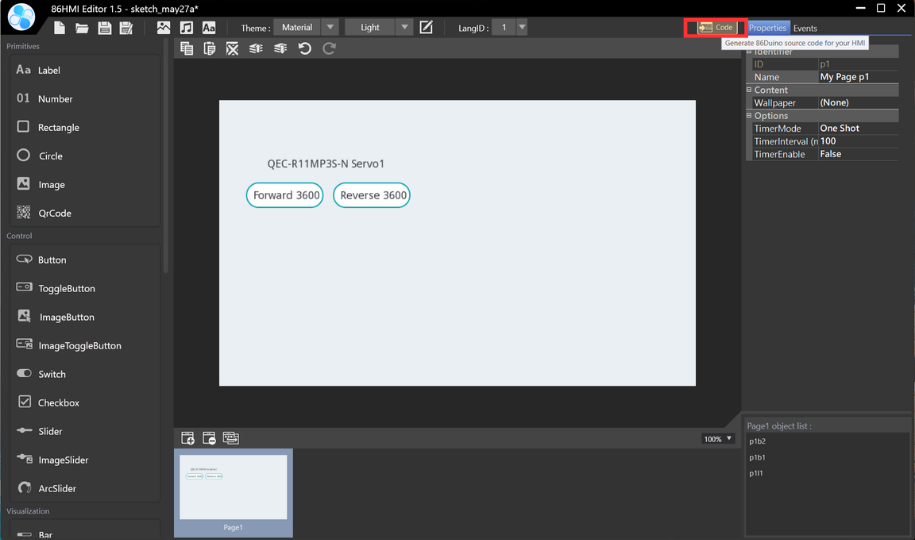
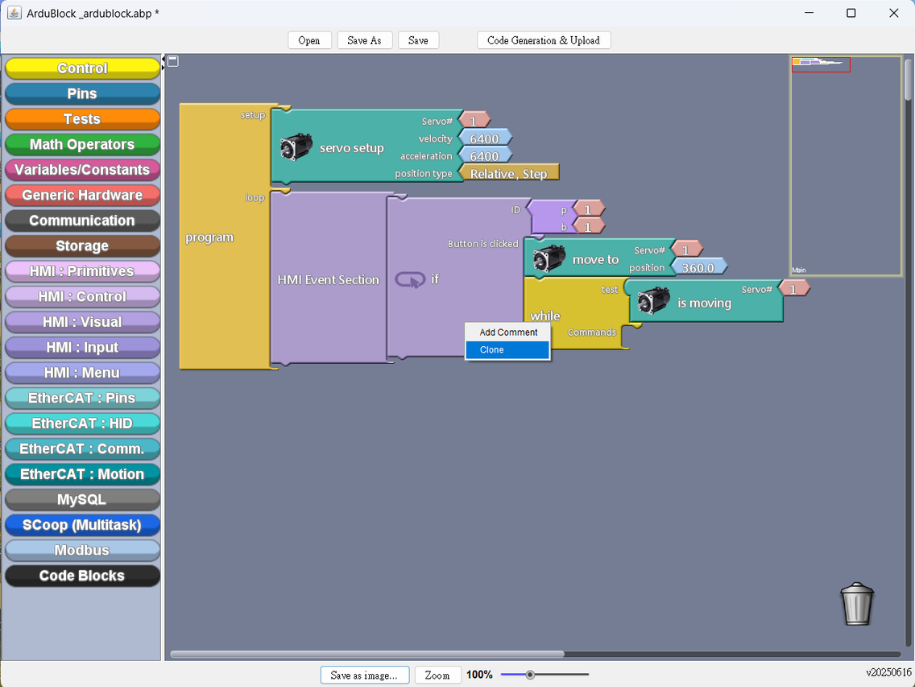
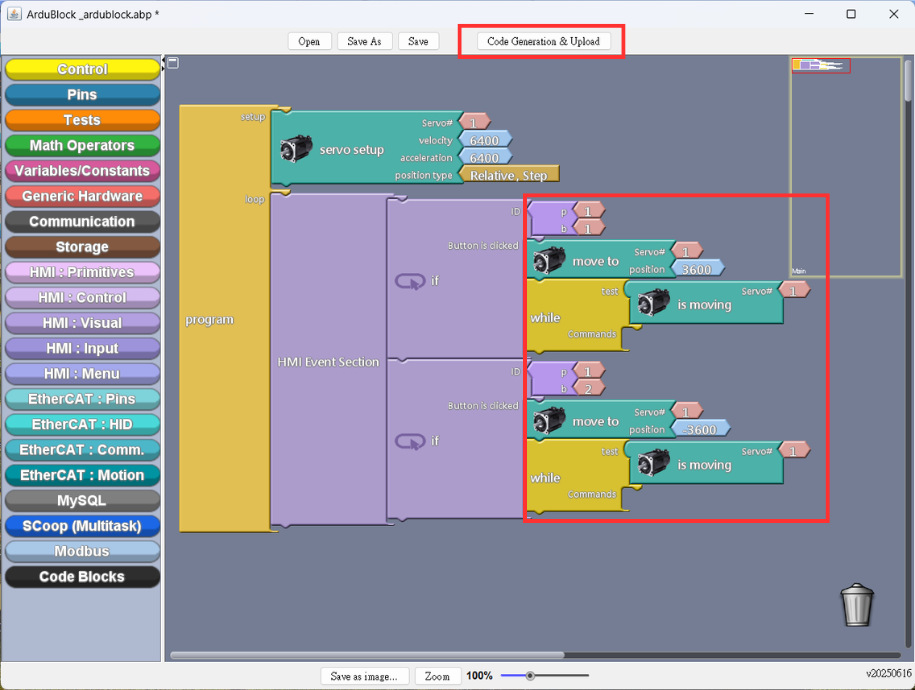
The implementation process can be divided into three main steps.



For more information or to request a sample, please email us at info@icop.com.tw, contact your nearest ICOP Branches, or get in touch with our Worldwide Official Distributor.