Specifications
Support CiA 402 device profile and G-code
3-axis independent control and pulse output up to 4Mpps
Pulse output options: Pulse/DIR
Encoder interfaces (A, B, Z), differential
Internal Monitoring Hardware Information
EtherCAT Conformance test tool verified
Operating Temperature -20 to +70 °C

| Pulse Type Motion Control | |||
| Interface | EtherCAT | ||
| Drive Profile | CiA402, G-code | ||
| Number of Motors | 3 | ||
| Minimum Communication Cycle | 125 µs | ||
| Synchronization Mode | DC, SM2, FreeRun | ||
| Pulse command Output | 4Mpps | ||
| Committed I/O Signal | Pulse± / Sing± / Home± / Son± / Alarm± / A± / B± / Z± for each channel | ||
| Encoder | |||
| Encoder Inputs | 3 x Encoder counter (A, B, Z), differential | ||
| Maximum Encoder pulse frequency | 14 MHz | ||
| Positioning Range | -2,147,483,648 through 2,147,483,647 pulse (32-bit) | ||
| General | |||
| Connector | Push-in Terminal (Euroblock) | ||
| Protocol | EtherCAT (RJ-45 x 2) | ||
| Ethernet Standard | IEEE 802.3 | ||
| Transmission Rate | 100Mbps | ||
| Power Connector | 4-pin Power Input/Output & 2-pin FGND | ||
| Power Requirement | +19 to +36VDC Power Input (Typ. +24VDC@300mA) | ||
| Power Consumption | Min. 7.2 W | ||
| LED Indicator | PWR, RUN, LINK, ERROR, Alarm, Home, Motor | ||
| Certifications | CE, FCC, VCCI | ||
| Environment | |||
| Operating Temperature | -20 to +70 °C | ||
| Hardware | |||
| Dimension | 107.45 x 66 x 30mm (Without DIN-Rail) | ||
| Weight | 370g | ||
| Installation | DIN rail | ||
| Internal Monitoring | Temperature, Voltage, Current, Startup time | ||
QEC-R00MV3S-N: EtherCAT Pulse Output Module
QEC-R00MV3S-C: EtherCAT Pulse Output Module (board with coating)
QEC-R11MV3S-N: EtherCAT Pulse Output Module/PoE
* For detailed ordering information, please contact our sales staff or view the user manual.
Description:
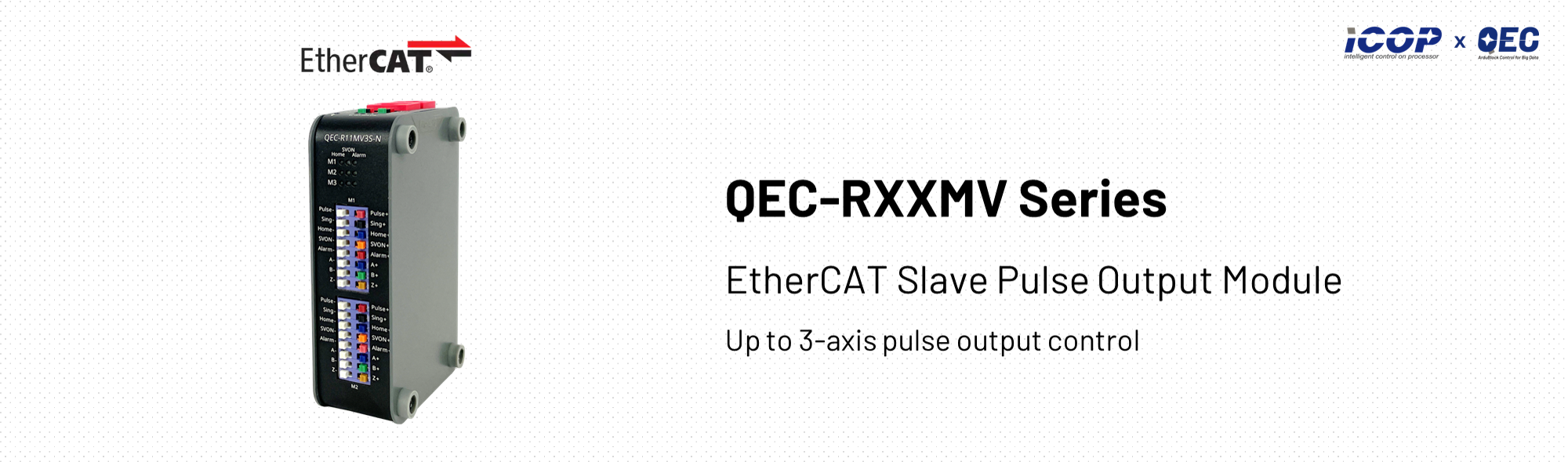
The QEC-RXXMV3S series is an EtherCAT stepper motor open-loop controller capable of high-speed synchronization at 125μs while driving 3-axis independent control and pulse output up to 4Mpps. Equipped with A, B, and Z encoder interfaces.
This series has passed the verification of conformance testing tools and is suitable for various traditional industrial automation applications, such as management and precise motion control.
The QEC-RXXMV3S series is a standard EtherCAT slave that requires an EtherCAT master to operate the device. It supports three operating modes: Free Run, SyncManager2, and Distributed Clock (DC). It not only supports the CiA402 drive profile, a standard within EtherCAT, allowing seamless integration with a variety of control systems; But it also Equipped with G-code parser, a widely used programming language in CNC machine tools, a widely used programming language in CNC machine tools.
This EtherCAT pulse output slave module can control three axes simultaneously with a high-speed 125μs synchronization. It offers significant advantages with its 3-axis independent control and pulse output up to 4Mpps, providing enhanced flexibility for complex motion control tasks, high-speed operation for precise and rapid motor movements, and improved precision essential for industries requiring exact positioning.
Additionally, the encoder interfaces (A, B, Z) with differential signaling deliver accurate position feedback, superior noise immunity, and enhanced motion control, making the QEC-RXXMV3S a reliable and precise solution for high-performance industrial applications.
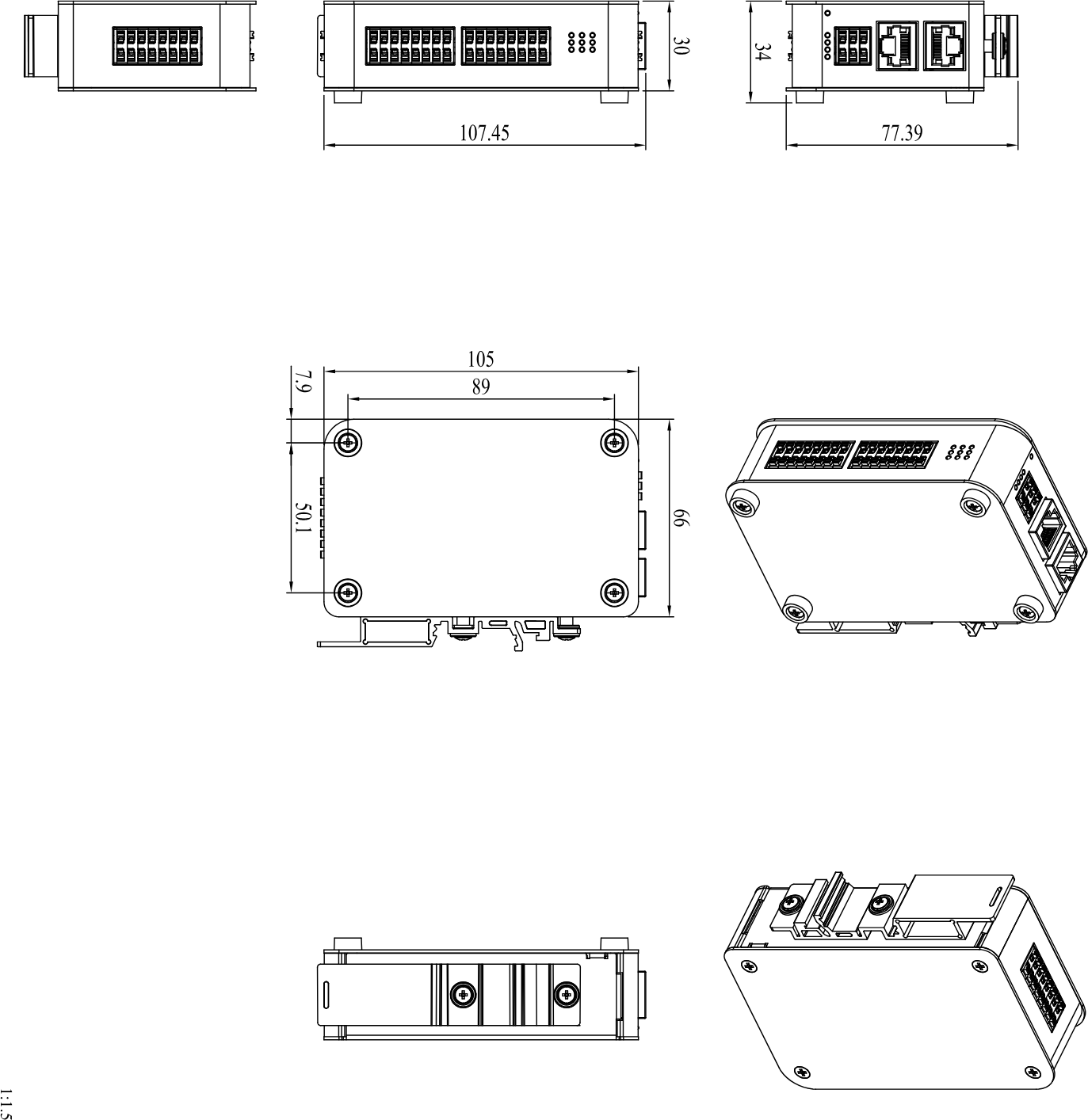
The QEC-RXXMV3S series has a compact size of 107.45 x 77.39 x 34 mm, making it very convenient for system installation via Din-Rail mounting. It operates within a temperature range of -20°C to +70°C and is equipped with two network ports for EtherCAT network redundancy, enhancing system reliability and stability.
Dimensions: