隨著六軸機械手臂在自動化設備、半導體周邊設備、檢測系統以及取放應用中的需求持續增加,系統整合商與設備製造商在實際導入過程中,經常面臨多項挑戰,包括控制架構複雜、同步精度要求嚴格,以及人機介面(HMI)與運動控制整合困難。
一套實用的 EtherCAT 架構與開發流程
使系統整合商與 OEM 能夠加速機器人手臂應用的開發
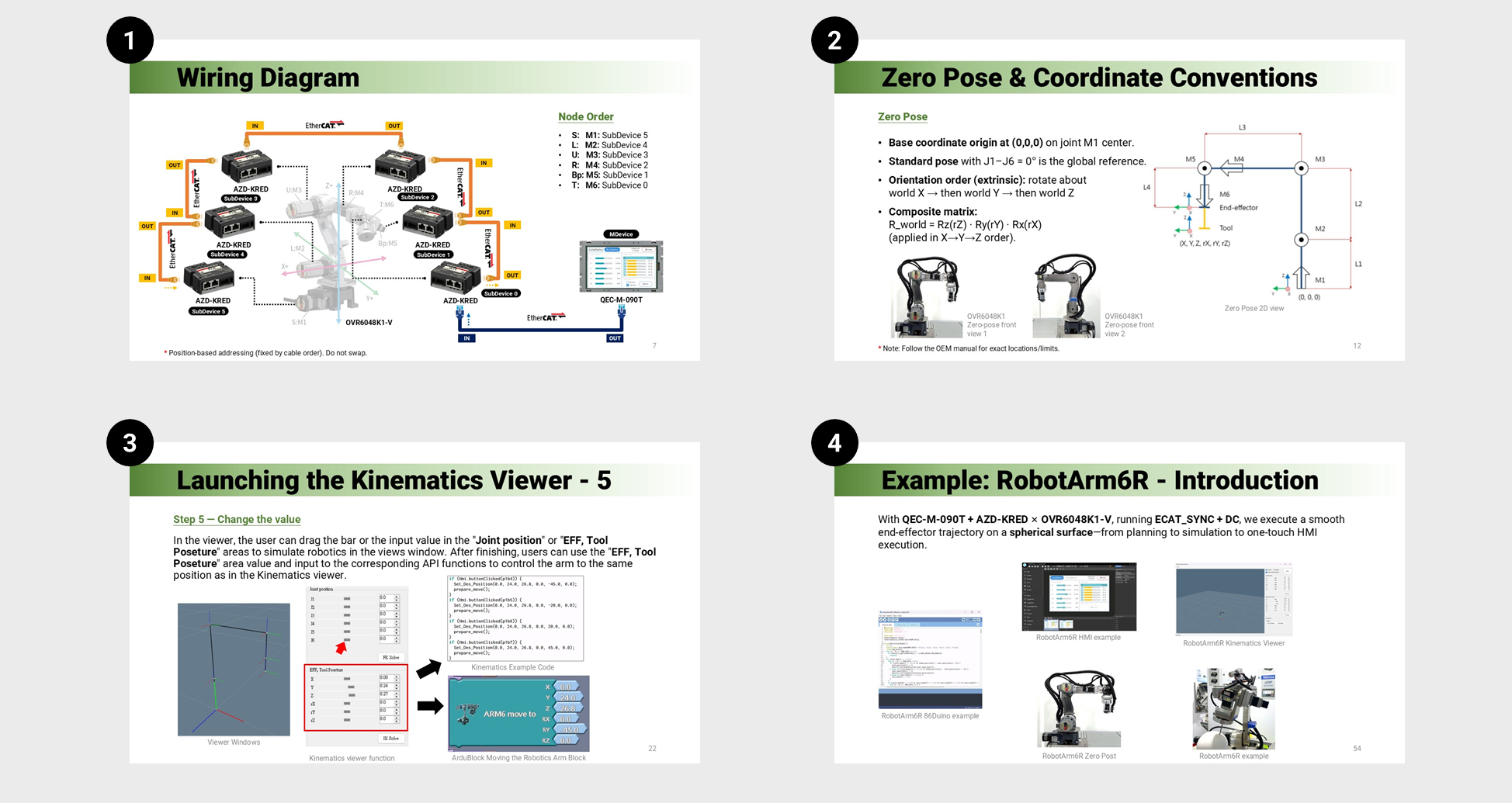
昭營科技近期完成以 QEC EtherCAT 主站平台 控制 東方馬達(Oriental Motor)OVR 系列六軸機械手臂 的整合與控制驗證。本次驗證展示了一套以 EtherCAT 為核心、可實際部署於設備端的機械手臂控制與開發架構,可作為系統整合商與 OEM 進行二次開發與專案導入時的技術參考。
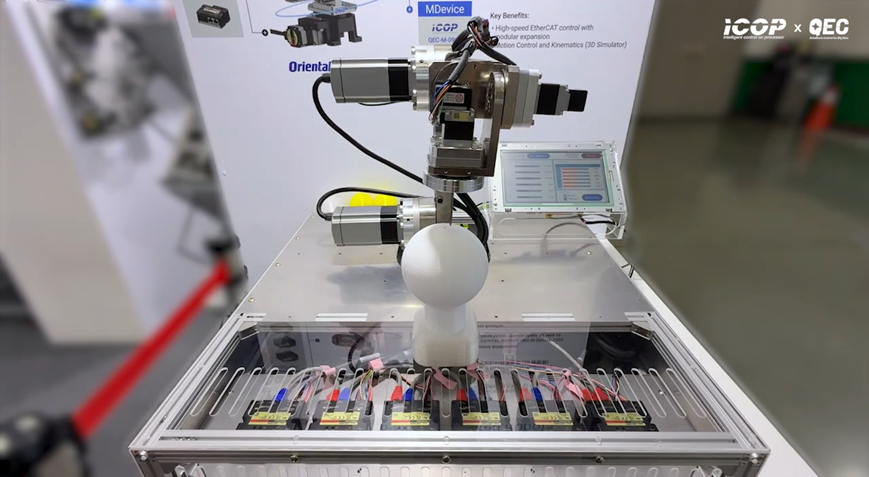
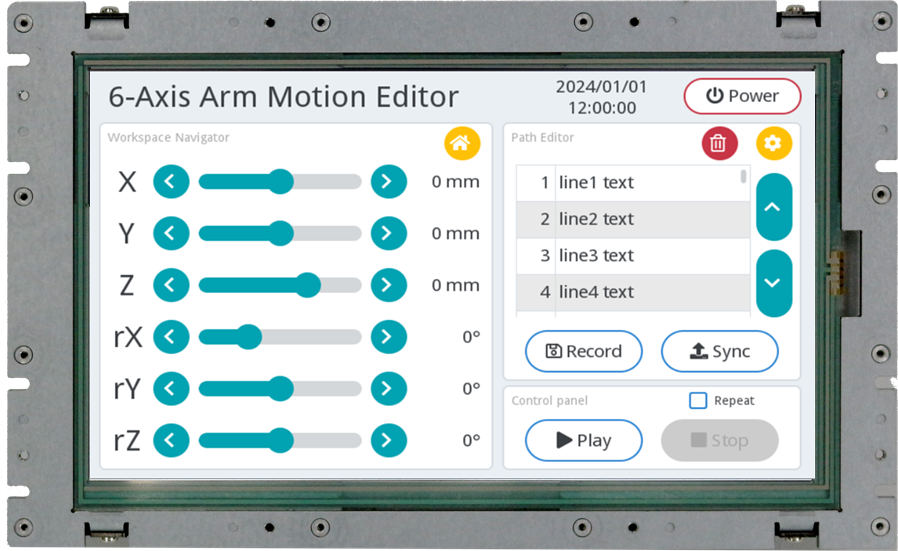
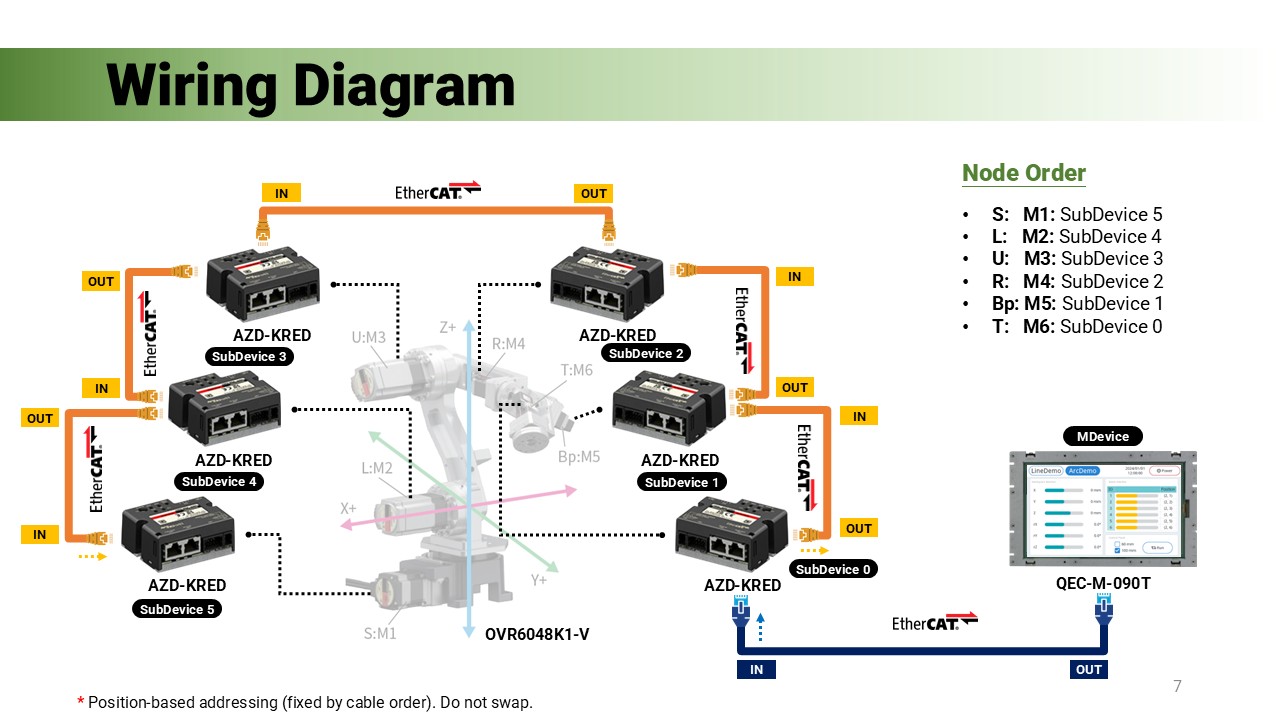
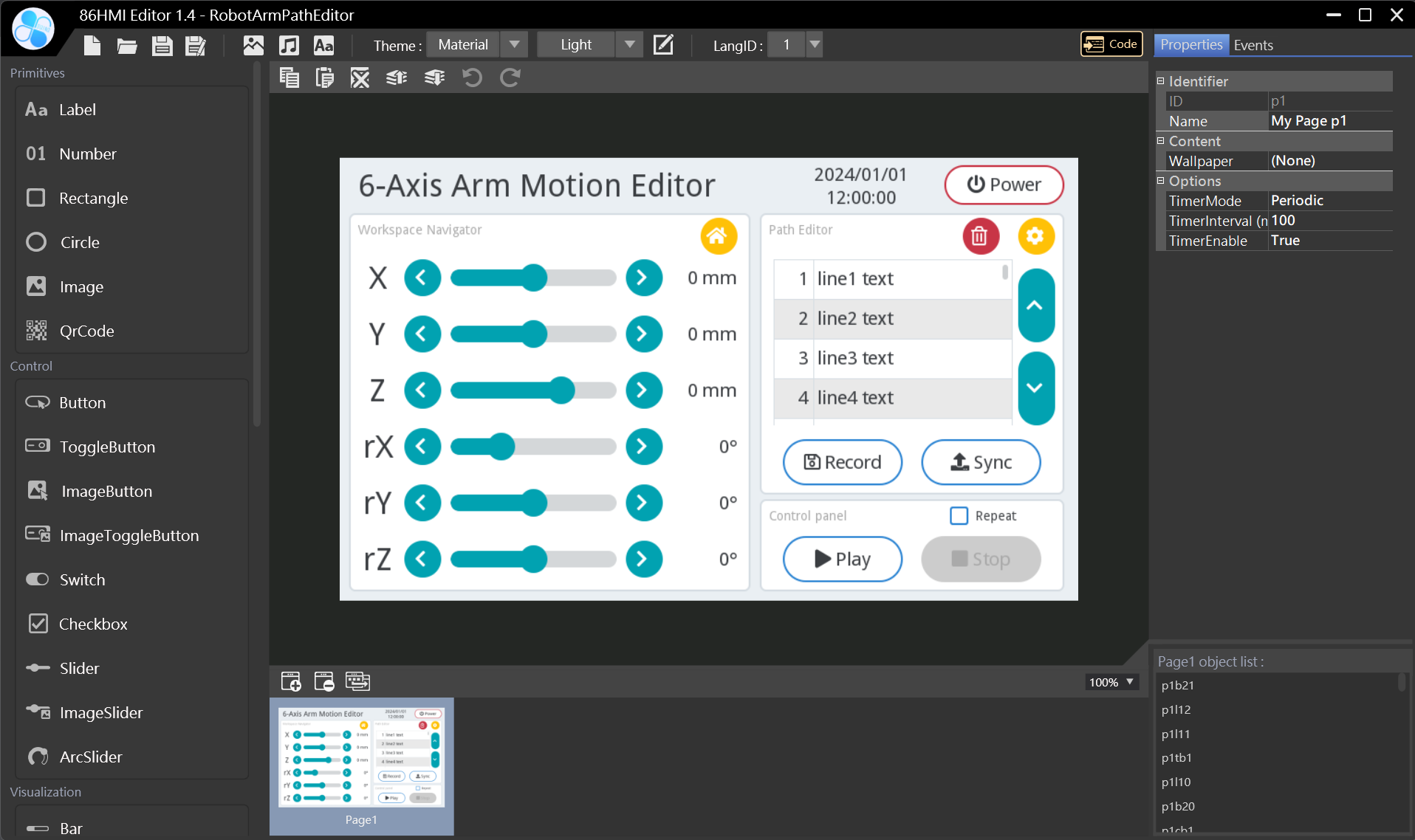
本次驗證系統採用 QEC-M-090T 作為 EtherCAT 主站與人機介面(HMI)整合平台,透過 EtherCAT 即時通訊與 OVR 六軸機械手臂驅動器連線,建立一個單一控制節點的 運動控制 (Motion) + HMI 架構。
系統主要特點包括:
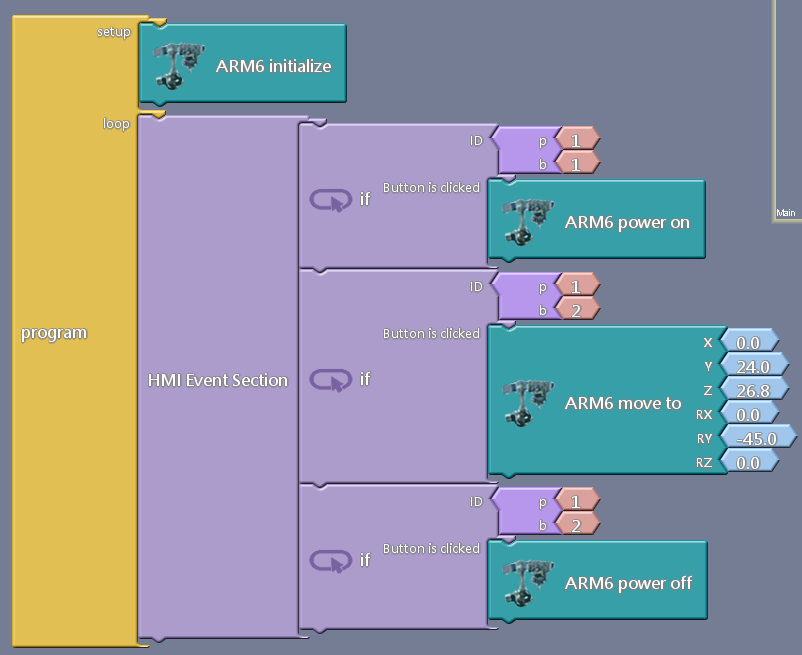
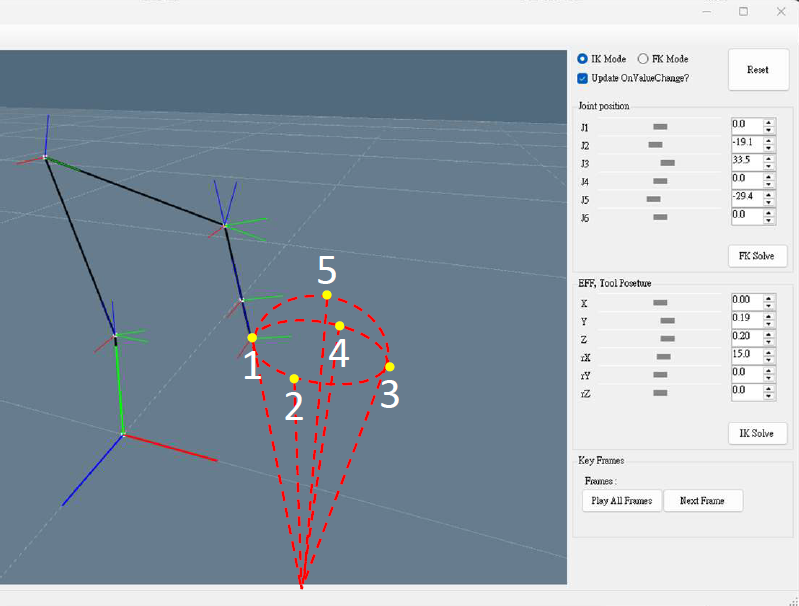
在軟體層面,我們採用 86Duino IDE (開源 C/C++ 架構) 作為主要開發環境,建立可重複使用的機械手臂控制工作流程:
此流程可作為手臂應用在設備端導入時的標準開發參考,降低初期整合風險。
透過此整合驗證,我們展示了 QEC EtherCAT 主站平台在六軸機械臂應用中的多項實用優勢:
此架構特別適合已採用或正在評估 東方馬達 OVR 六軸機械臂,並希望完全掌控運動層與應用層的機械製造者與系統整合商。
昭營科技將持續以 QEC EtherCAT 平台為基礎,深化與東方馬達所提供的機械手臂與馬達的技術整合,並持續提供:
期望透過更緊密的技術合作模式,協助客戶縮短開發時程,並擴展機械手臂在實際設備中的應用場景。
如果您計劃部署或已部署東方馬達的 OVR 六軸機械臂,並希望進一步探索基於 EtherCAT 的控制架構與開發流程,請聯絡我們進行技術討論與專案諮詢。
如需更多資訊或索取樣品,請寫信至 info@icop.com.tw,致電與您最近的 ICOP 分公司,或連繫我們的 全球官方經銷商。