EtherCAT(乙太網路控制自動化技術)是一種即時工業乙太網路技術,最初由 Beckhoff Automation 開發,現由EtherCAT技術聯盟(ETG)維護。該技術已通過IEC 61158標準化認證,可滿足工廠自動化、運動控制、測試與量測及其他時間敏感應用中的硬即時與軟即時需求。
(延伸閱讀: EtherCAT - 乙太網路現場總線)
詳細資訊亦可參閱EtherCAT 產品手冊,該手冊提供多種語言版本。 
ICOP 的 QEC EtherCAT 解決方案提供端對端解決方案,涵蓋EtherCAT 主裝置 (主站)、多種從站裝置(從站),以及開發者友善的控制器軟體整合開發環境(86Duino IDE),協助團隊加速建構可靠系統。
(延伸閱讀:ICOP「QEC」EtherCAT解決方案結合虛擬程式設計與資料庫函式庫,加速您的工業4.0轉型)
QEC MDevice 基於 DMP Electronics 的雙核心 Vortex86EX2 開發,並採用開源的 86Duino IDE(工業級 Arduino)進行快速開發。(延伸閱讀: EtherCAT MDevice 效能基準測試)
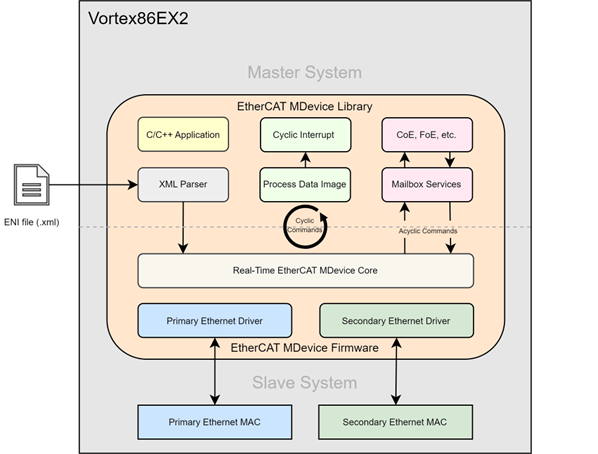
根據 ETG.1500 對 MDevice 實作的規範,QEC MDevice 負責執行下列任務:
這些程式專為在 FreeDOS 作業系統上運行而設計,並使用 DJGPP 環境提供的 GCC 編譯器進行編譯。
(延伸閱讀:EtherCAT 函式庫 API 使用者手冊)
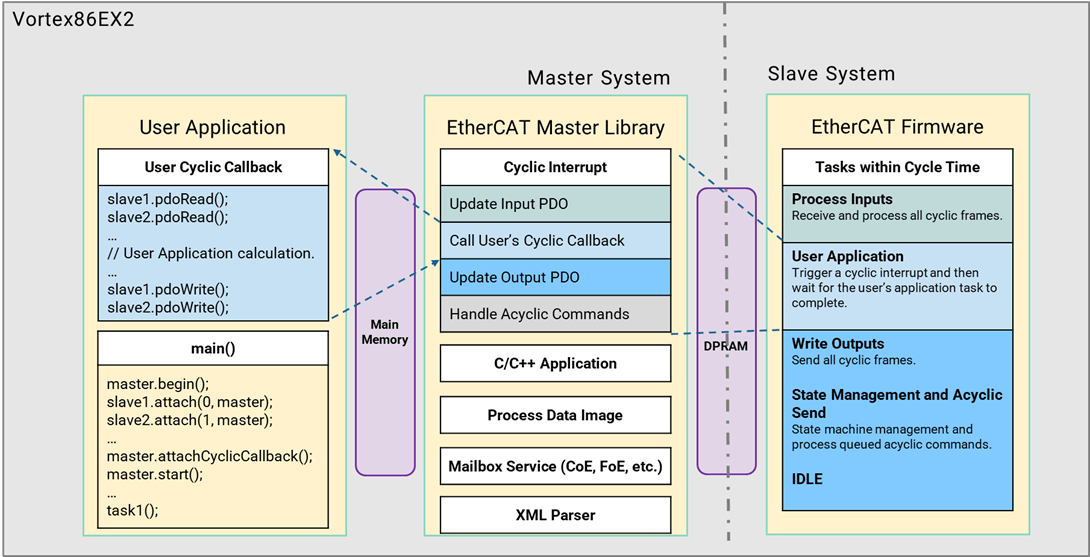
本節主要探討雙系統PDO資料的同步機制。如下方示意圖所示,用戶應用程式與EtherCAT MDevice函式庫模組運行於主系統,而即時EtherCAT MDevice核心則運行於從屬系統。
(延伸閱讀: EtherCAT 函式庫 API 使用者手冊)