Smart manufacturing has become a global trend, and labor shortages have become the norm. Due to the lack of engineers, the urgent need for non-traditional engineers to write simple automation programs to upgrade to Industry 4.0 has become more popular.
To address these needs, ICOP has developed a complete EtherCAT solution that allows for a quick promotion to real-time Industry 4.0 with "Industrial Arduino-based graphical software tools and SQL libraries".

EtherCAT is a real-time Industrial Ethernet technology originally developed by Beckhoff Automation and maintained by the ETG (EtherCAT Technology Group). The EtherCAT protocol disclosed in the IEC standard IEC61158 is suitable for hard and soft real-time requirements in automation technology, test and measurement, and many other applications.
The main focus during the development of EtherCAT was on short cycle times (≤ 100 µs), low jitter for accurate synchronization (≤ 1 µs), and low hardware costs.
Through addressing mode of EtherCAT and the memory control technology “Fieldbus Memory Management unit (FMMU)” performed by EC-Slaves hardware, we can exchange all data synchronically from all ECAT-Slaves on bus by just passing one single internet packet.
The EtherCAT SubDevice are usually equipped with EtherCAT SubDevice IC (so-called ESC). With the FMMU technology, the exchange of 1000 unit I/O data can be finished within only 30us. Data for 100 axis servo motor can be exchanged only within 100 us. Please refer to the table below. (According to ETG data, EtherCAT Performance overview. Source of information: http://www.ethercat.org/)
| Process Data | Update Time |
|---|---|
| 256 distributed digital I/O | 11μs |
| 1000 distributed digital I/O | 30μs |
| 200 channels analog I/O (16 Bits) | 50μs ( =20kHz ) |
| 100 servo axis (8 Bytes Input and output per axis) | 100μs |
| 1 Fieldbus MDevice-Gateway (1486 Bytes Input and 1486 Bytes output data) | 150μs |
Read More: The Benefits of Using the EtherCAT Transmission Standard
QEC offers a complete solution for EtherCAT, including EtherCAT MDevice and common EtherCAT SubDevice modules (e.g., Digital I/O, Analog I/O, RS232/485, converters, motion controller/drivers, etc.); highly integrated hardware and software for a wide range of industrial automation applications, creating a more economical industrial IoT smart technology
Read More: The Advantages of using the QEC family of EtherCAT products
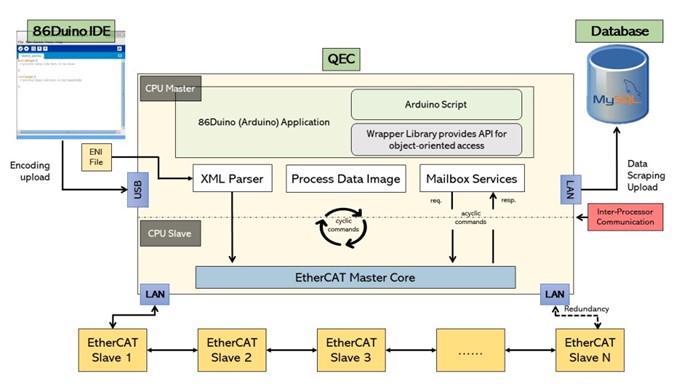
The QEC-M series is an EtherCAT MDevice that uses a dual-core, independently operating DM&P Vortex86EX2 processor for real-time, reliable synchronous EtherCAT control. The master core of the processor serves as the Arduino development environment; the slave core of the processor serves as the Real-time EtherCAT MDevice. The two cores exchange data via Inter-Processors Communications (IPC).
Read More: QEC — EtherCAT MDevice’s Benchmark
QEC uses the hardware foundation of the famous industrial Ethernet technology, EtherCAT. In addition to providing a complete solution for EtherCAT, and also supports the Industrial Arduino's development environment.
Users can go through the 86Duino IDE's rich built-in library of examples, functions, and graphical programming tools to reduce the development time and engineering staff threshold. Besides, users can also use MySQL libraries to build the Big-data database and quickly upgrade to real-time IIoT.
Most industrial applications require high precision and synchronous operation speed, which is highly complex and has a long development cycle. However, by using the QEC-supported 86Duino IDE (Industrial-Arduino), a dedicated EtherCAT library will provide rich Arduino APIs for programming and EtherCAT system operation.
In addition to common basic functions, such as digital control, analog control, etc., there are also large numbers of open-source function libraries and examples for developers to use, such as Ethernet, SPI, Serial, or Modbus, including the LVGL Lightweight Graphics Library for creating user interfaces and MySQL functions.
Users can also develop their system via the graphical EtherCAT configuration tool, 86EVA (EtherCAT-Based Virtual Arduino), which can be used to configure EtherCAT MDevice and SubDevice quickly.
Lastly, users will be able to develop a complete system by using the ideal QEC Low-Code development platform consisting of the GUI design aid, HMI Editor, and the drag-and-drop program builder, ArduBlock.
-1.png)
ICOP's QEC provides a complete set of open software resources for developers.
The 86Duino environment can be extended through the use of libraries, just like most programming platforms. Libraries provide extra functionality for use in sketches, e.g., working with hardware or manipulating data. A number of libraries come installed with the IDE, and 86Duino supports most of the Arduino Standard Libraries as well as provides dedicated libraries to utilize the 86Duino-specific hardware functions.
You can also download or create your own libraries. See these instructions for details on installing libraries. There’s also a tutorial on writing your own libraries; and further, you may refer to Arduino’s API Style Guide for some guidelines on making a good Arduino-style API for your library.
See also the list of other Arduino third-party libraries that are compatible with 86Duino.
Read More: QEC 86Duino Libraries Reference
For more info and sample request, please write to info@icop.com.tw, call your nearest ICOP Branch, or contact our Worldwide Official Distributor.