
EtherCAT is an open-source industrial Ethernet technology with high-performance, low-cost, easy-to-use, and flexible topology. It was introduced in 2003 and has been an international standard since 2007. The EtherCAT Technology Group promotes EtherCAT and is responsible for its continued development.
The popularity of Fieldbus usage in automation technology has led to the widespread use of PC-based control systems. The mainstream architectures are primarily divided into traditional and EtherCAT solutions.
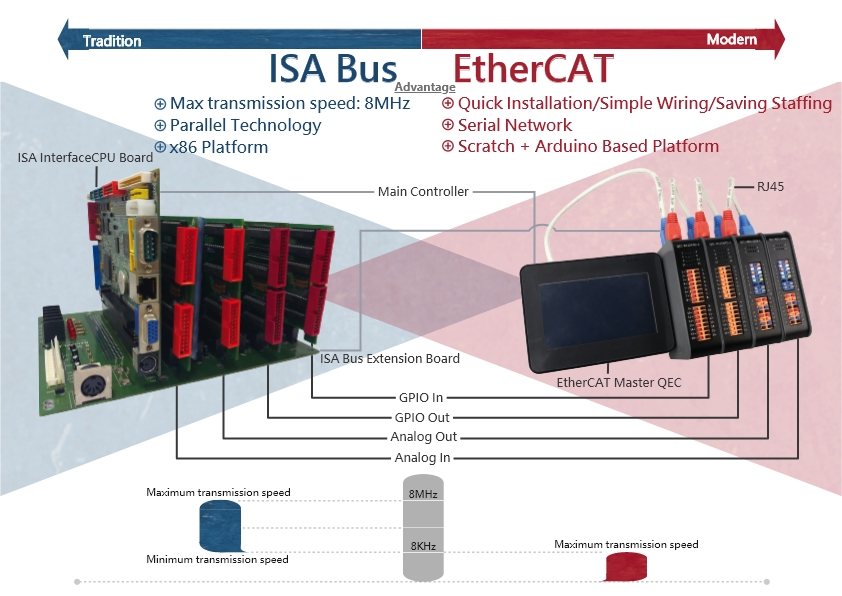
Traditional solutions use hierarchical control systems, usually consisting of several auxiliary systems in a cyclic system, including the actual control task, the field bus system, the local extension bus in the I/O system, or simple local devices for peripherals.
ISA Bus, for example, has been used in the automation field for more than 40 years. It is widely used because of its ability to perform multiple processes such as transmission speeds of 8 MHz, a range of software source code functions, as well as allowing access to various Analog and Digital output.
EtherCAT solutions have become increasingly popular for automation-related applications in recent years. The connections between master and slave devices can be made via network cables only, making EtherCAT devices stand out from other industrial communication standards due to their fast installation, simple wiring, and labor-saving installation.
Ethernet itself represents a level of technological advancement as in the past, the application types that generally used Fieldbus systems required the system to have good real-time capabilities, adaptable to small data communications, and be economical. EtherCAT meets these requirements for real-time automation technology, testing and measuring, a variety of other applications.
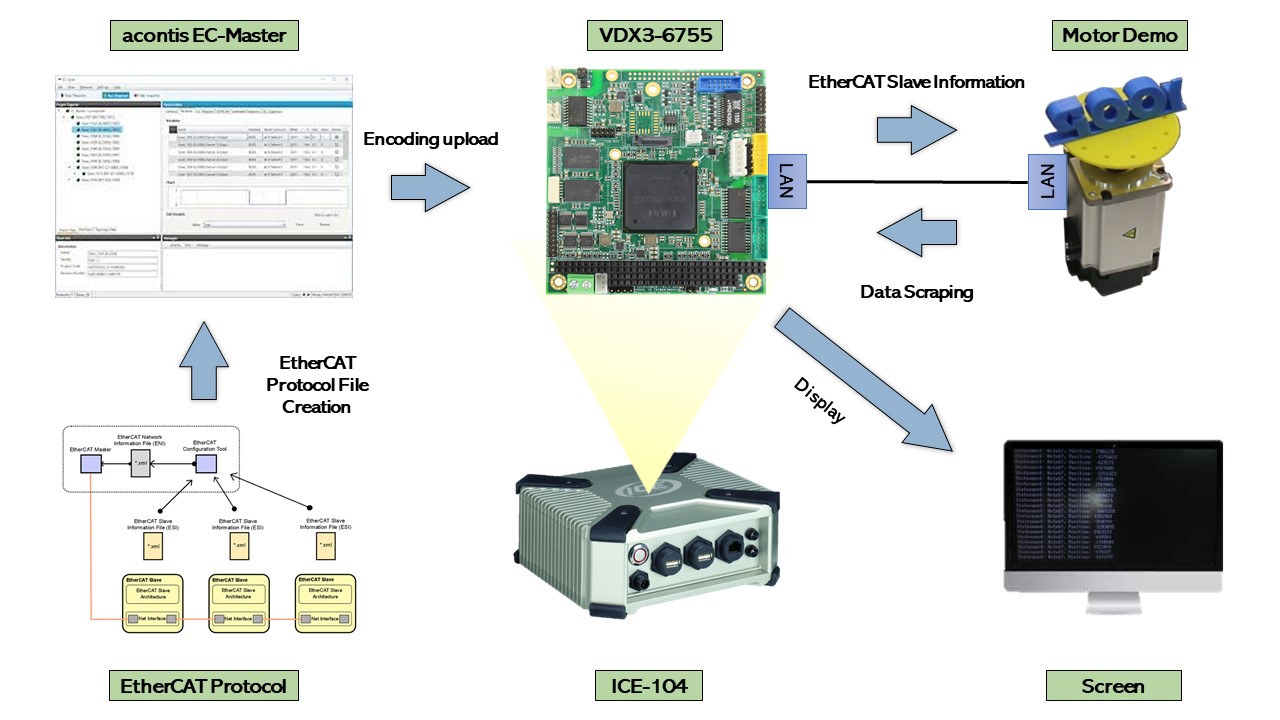
This demo application uses the VDX3-6755 as the EtherCAT Master hardware device. Through an Ethernet connection, it is capable of controlling the slave device running an application which controls a motor that rotates a model. The rotation data is displayed on-screen at the same time, showing real-time data transfer. The VDX3-6755 is running with EC-Master software and using DOS in this demo.
| Project Name | VDX3-6755 Uses EtherCAT Protocol to Control Motor Spin and Transfer Data |
| Functions | 1. EtherCAT Software: Acontics EC-master 2. Motor Control 3. Data Transfer |
| Prepare | 1. VDX3-6755 (EtherCAT Master) 2. ICE-104 3. Motor (EtherCAT Slave) 4. Screen |
| Work Procedure | 1. VDX3-6755 connect Motor and Screen via RJ45 2. VDX3-6755, Motor and Screen Power on. 3. Use the Image build in VDX3-6755 (by EC-master) to control the Motor and Screen at the same time. |
*If you are interested in this demo, please contact info@icop.com.tw for more detail information.

Feel free to contact info@icop.com.tw or your local sales for further information and related technical support.