6軸ロボットアームの導入が拡大する中、システムインテグレーターやOEMは、複雑な制御、厳しい同期要件、そしてHMIとモーション制御の統合といった課題に直面することが少なくありません。
実用的なEtherCATアーキテクチャと開発ワークフロー
システムインテグレーターおよびOEMによるロボットアームアプリケーション開発の迅速化を実現
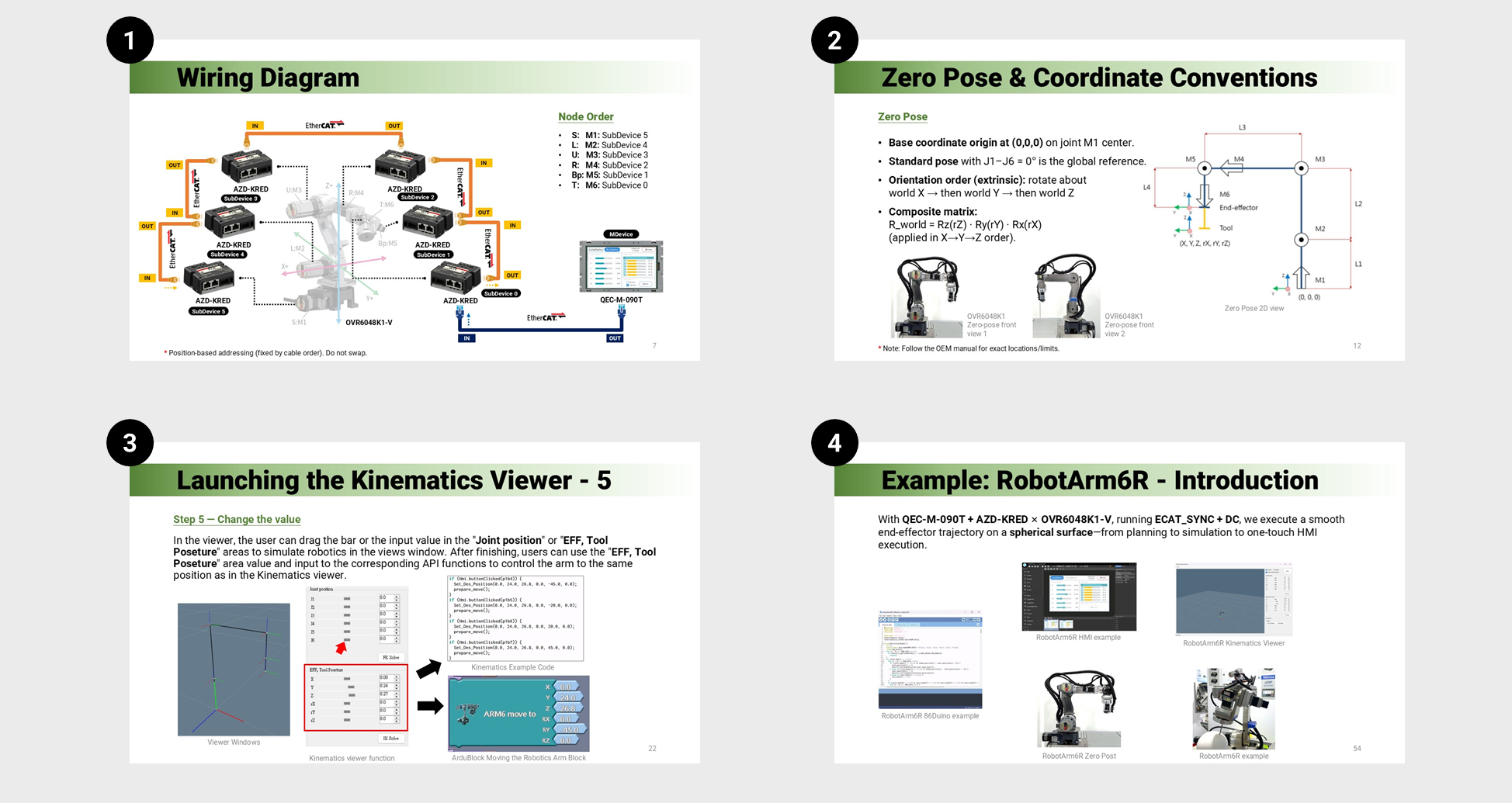
ICOP Technology はこのたび、Oriental Motor OVR シリーズ 6軸ロボットアームの統合および制御検証を、QEC EtherCAT MDevice プラットフォームを用いて完了しました。本検証では、実機導入に適したEtherCATベースのロボットアーム制御および開発アーキテクチャを実証しており、二次開発やプロジェクト統合を行うシステムインテグレーターおよびOEMにとっての技術的リファレンスとなります。
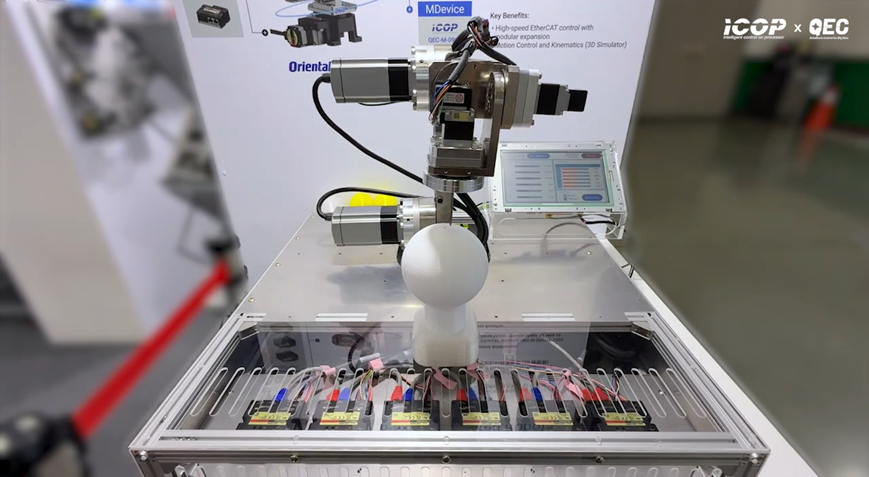
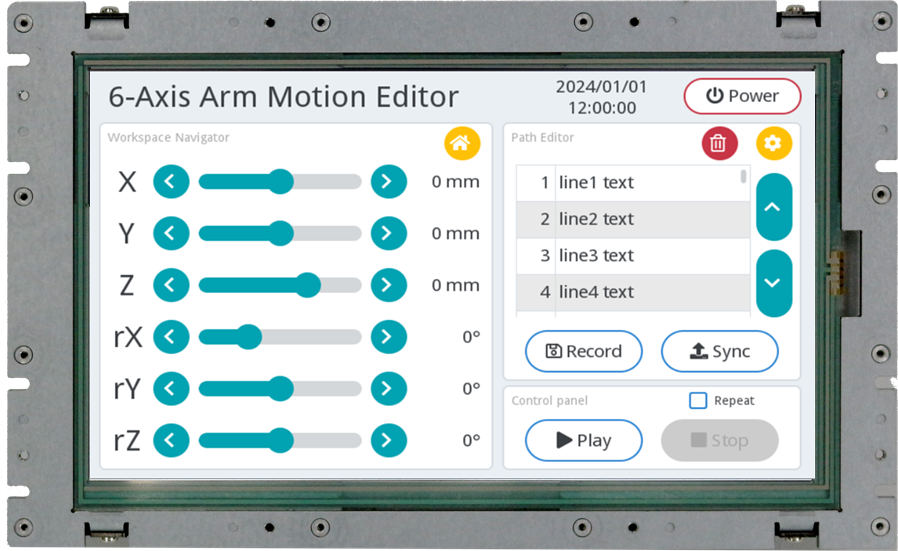
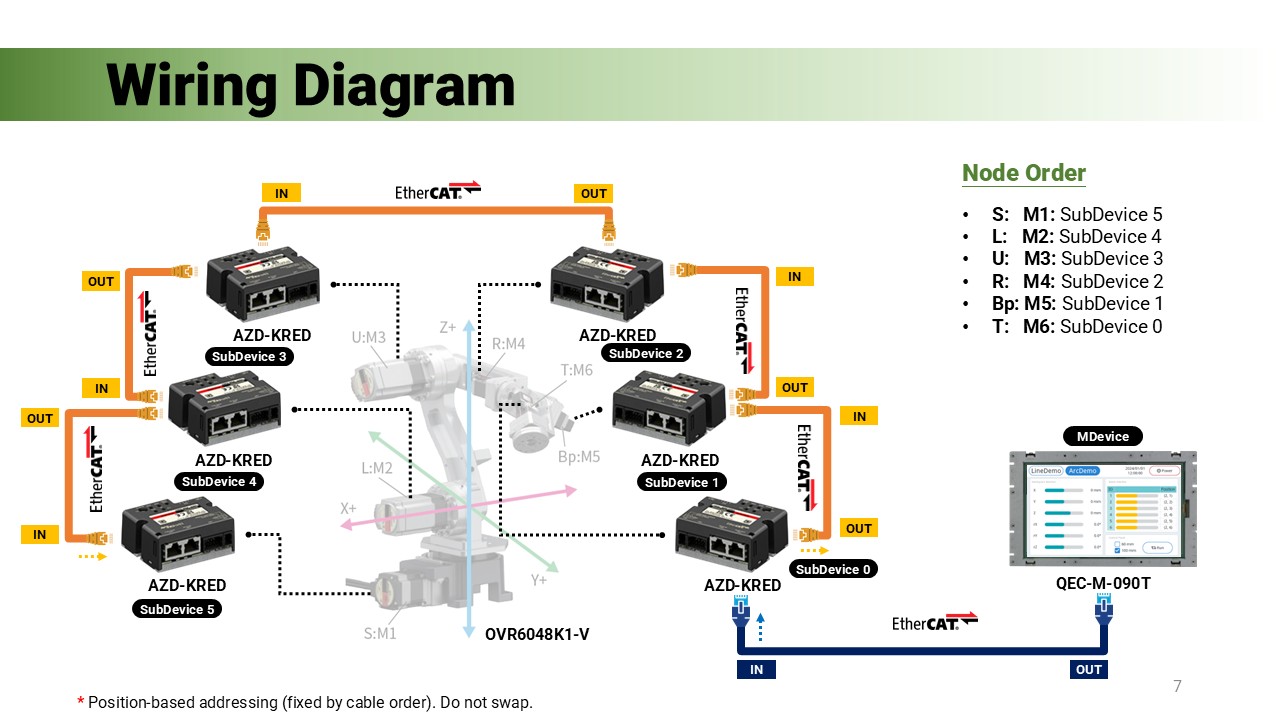
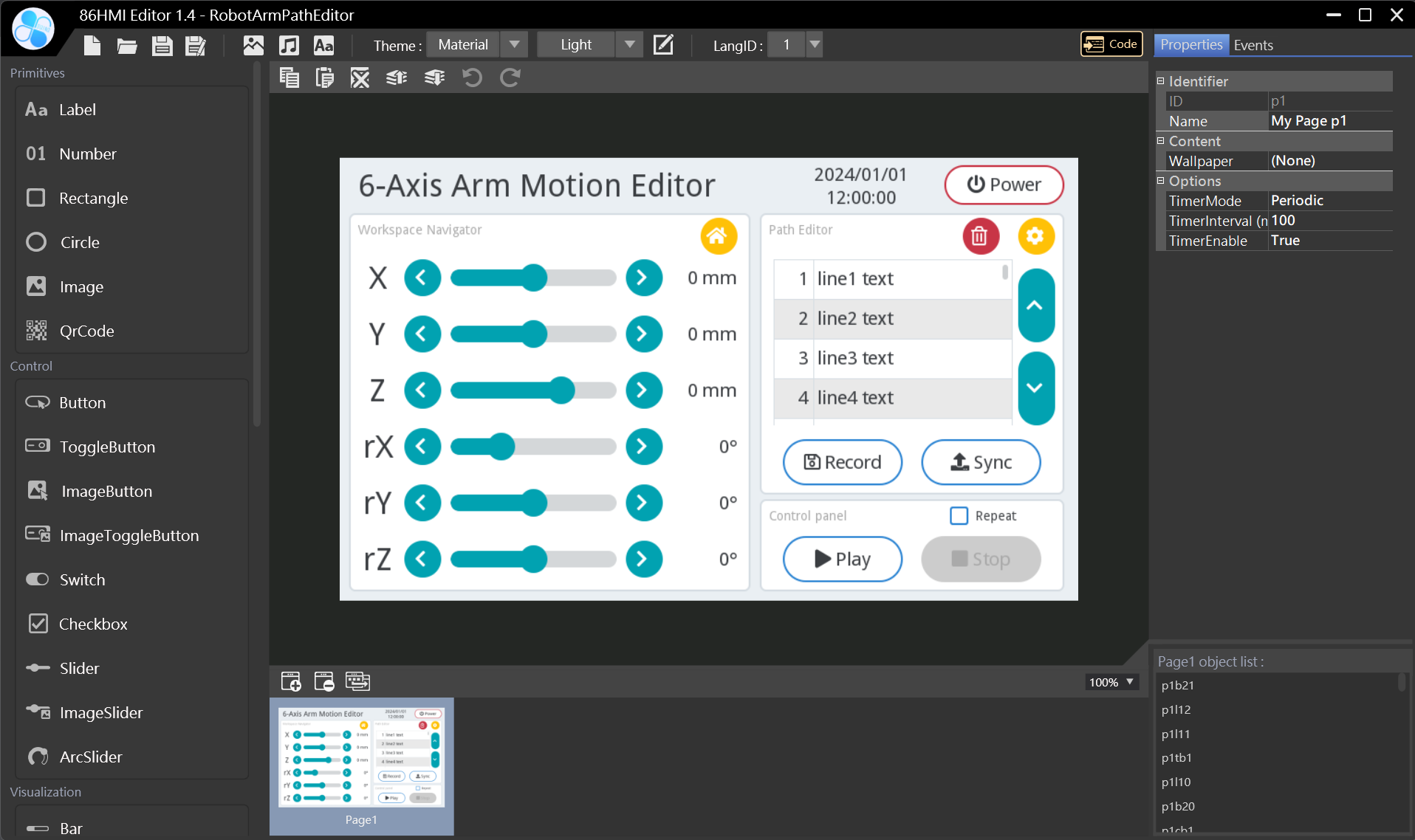
本検証システムでは、統合型 EtherCAT MDevice および HMI プラットフォームとして QEC-M-090T を採用しています。リアルタイム EtherCAT 通信を通じてコントローラが OVR 6軸ロボットアームのドライブと接続され、単一ノードによるモーション+HMI アーキテクチャを構成します。
主なシステム構成要素は次のとおりです:
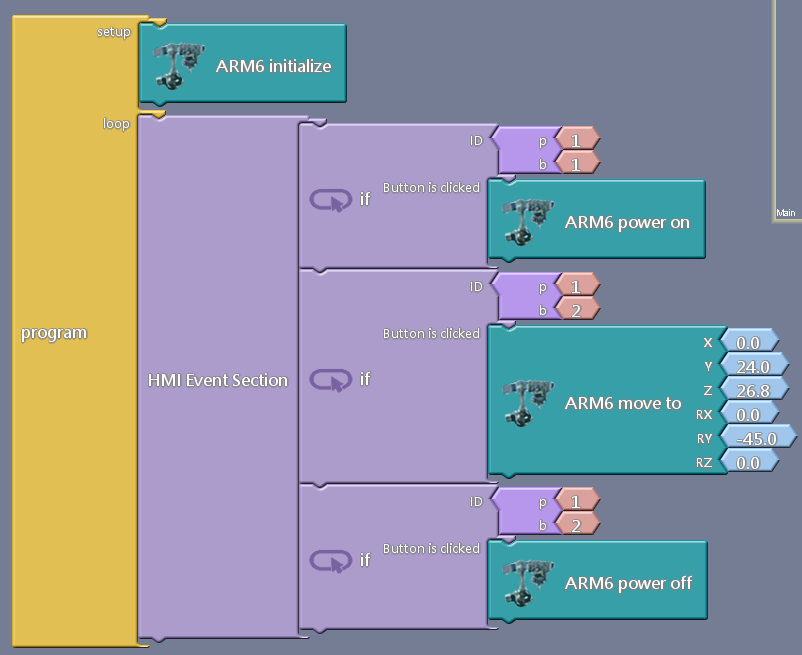
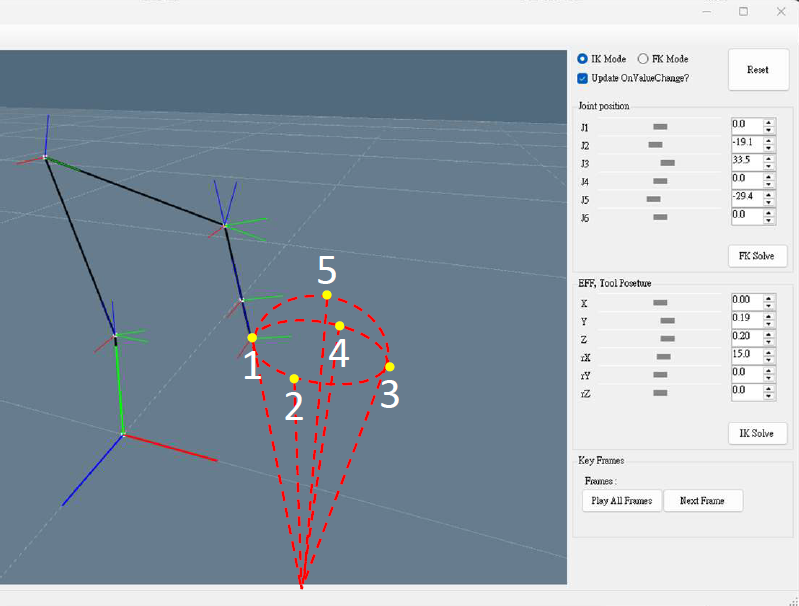
ソフトウェア面では、ICOP は主要な開発環境として 86Duino IDE(オープンソース、C/C++ アーキテクチャ)を採用し、再利用可能なロボットアーム制御ワークフローを構築しています:
本ワークフローは、装置へのロボットアームアプリケーション導入時における標準的な開発リファレンスとして活用でき、初期統合リスクの低減に貢献します。
本統合検証を通じて、ICOP は 6軸ロボットアーム用途における QEC EtherCAT MDevice プラットフォームの実用的な利点を以下の通り示しました:
本アーキテクチャは、Oriental Motor OVR 6軸ロボットアームを既に採用している、または導入を検討している装置メーカーおよびシステムインテグレーターにとって、モーション層およびアプリケーション層の制御を自社で維持したい場合に特に適しています。
ICOP は今後も QEC EtherCAT プラットフォームを基盤として、Oriental Motor が提供するロボットアームおよびモーションソリューションとの技術統合をさらに深化させ、以下を提供してまいります:
より緊密な技術連携を通じて、ICOP はお客様の開発期間短縮を支援し、産業機器におけるロボットアームアプリケーションの導入拡大を目指します。
Oriental Motor は、ステッピングモーター、サーボシステム、ドライバ、ロボットソリューションなど、幅広い産業用モーション製品を提供しており、多様な自動化アプリケーションに対応しています。
詳細情報:www.orientalmotor.com
ICOP Technology Inc. は、よりスマートで高速かつ高効率な制御システムを実現するため、堅牢で革新的な EtherCAT オートメーションプラットフォームを提供し続けています。 詳細情報やサンプルのご要望については、info@icop.com.tw までメールでご連絡いただくか、最寄りの ICOP 拠点、または 正規代理店 までお問い合わせください。