EtherCAT (Ethernet for Control Automation Technology) is a real-time Industrial Ethernet technology originally developed by Beckhoff Automation and maintained by the EtherCAT Technology Group (ETG). Standardized in IEC 61158, it meets hard and soft real-time requirements for factory automation, motion control, test & measurement, and other time-critical applications.
(Read more: EtherCAT - the Ethernet Fieldbus)
Detail information can also be found in the EtherCAT Brochure, available in various languages.

ICOP’s QEC EtherCAT Solution delivers an end-to-end solution, covering the EtherCAT MDevice (master), a range of SubDevices (slaves), and a developer-friendly controller software IDE (86Duino IDE), so teams can build reliable systems faster.
(Read more: ICOP’s “QEC” EtherCAT Solution, Combined with Virtual Programming and Database Libraries, Accelerates Your Industry 4.0 Process)
QEC MDevice is built on the dual-core Vortex86EX2 by DMP Electronics and uses the open-source 86Duino IDE (Industrial-Arduino) for rapid development. (Read more: EtherCAT MDevice Benchmark)
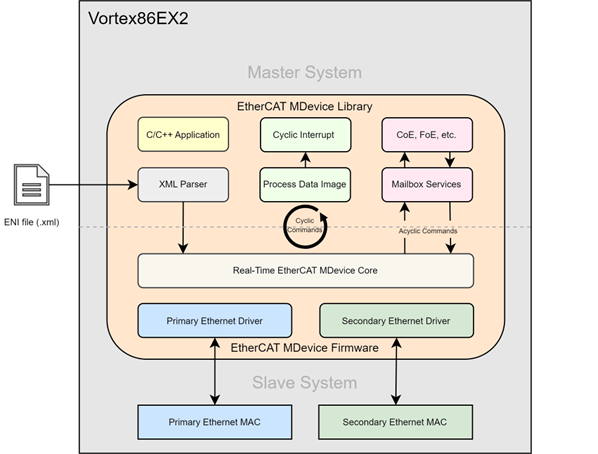
Based on ETG.1500 guidelines for MDevice implementations, the QEC MDevice is responsible for the following tasks:
The programs are designed to run on the FreeDOS operating system and have been compiled using the GCC compiler provided by the DJGPP environment.
(Read more:EtherCAT Library API User Manual)
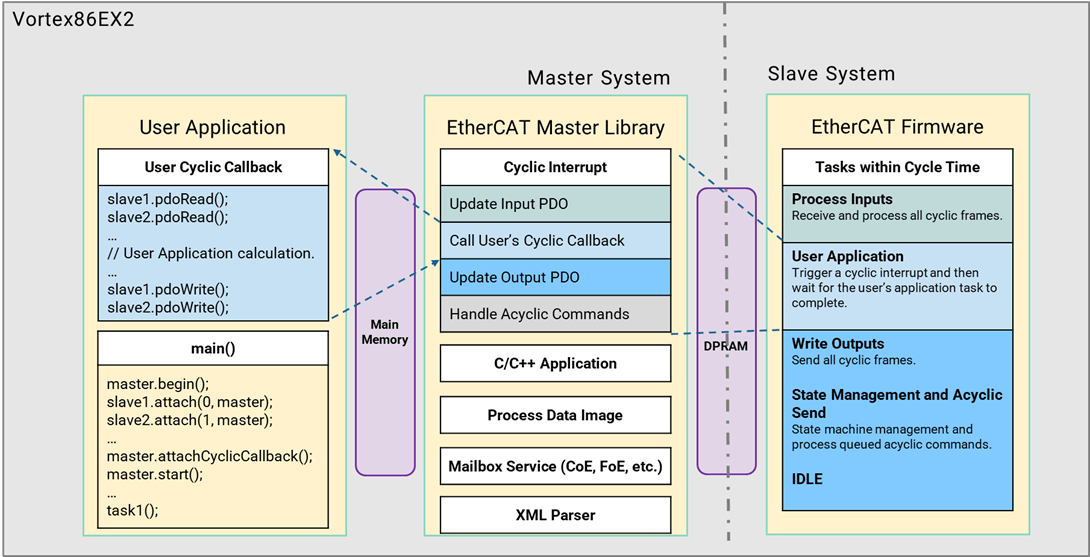
The primary focus of this section is the synchronization of dual-system PDO data. As illustrated in the diagram below, the User Application and EtherCAT MDevice Library blocks run on the Master System, while the Real-Time EtherCAT MDevice Core runs on the Slave System.
(Read more: EtherCAT Library API User Manual)

86EVA is a graphical EtherCAT configuration tool that utilizes the EtherCAT Library in the 86Duino IDE.

86HMI Editor is a HMI tool designed for engineers and designers utilizing 86Duino IDE, based on LVGL 7.11.

ArduBlock is a visual programming language that writes programs by drag and drop building blocks.

Compact and fanless EtherCAT MDevices designed for control cabinets and embedded systems, offering real-time synchronization and reliable performance.

Designed for seamless integration into equipment and control panels, the QEC-M Series Openframe MDevice offers EtherCAT real-time control with an embedded HMI for flexible system.

Featuring 9” and 15” front-panel displays, the QEC-M Series Panel PC offers EtherCAT real-time control with a built-in HMI for intuitive operation.

EtherCAT SubDevice - Digital I/O modules are equipped with 8, 16, 32 isolated digital input / output channels.

EtherCAT SubDevice - HID (Human Interface Device) modules are equipped with MPG, UART ports, Keypad, and LCM.

EtherCAT SubDevice - Analog I/O modules are equipped with 4, 6, and 8 ADC / DAC slots., and offer channel-independent configuration and signal type selection.

EtherCAT Compound SubDevice. EtherCAT Digital Input/Output + Analog Input/Output + Serial Port (RS-232/485) Module.

EtherCAT SubDevice Stepper Motor Controllers, Pulse Output modules, and Servo motors.

